

Технические науки
Pyatakov E.N.
PhD, associate professor,
National University «Odessa Maritime Academy»
Пятаков Эдуард Николаевич
кандидат технических наук, доцент,
Национальный университет «Одесская морская академия»
FORMALIZATION OF SITUATION OF DANGEROUS RAPPROCHEMENT OF VESSELS
ФОРМАЛИЗАЦИЯ СИТУАЦИИ ОПАСНОГО СБЛИЖЕНИЯ СУДОВ
Summary: Formalization of situation of dangerous rapprochement of vessels is produced. Formulas for the calculation of parameters of relative motion of vessels depending on the parameters of their veritable motion are resulted.
Analytical expressions for the calculation of values of time and distance of the shortest rapprochement of pair of vessels are got. The condition of rapprochement of vessels depending on the parameters of situation of their rapprochement is got.
Keywords: safety of navigator, divergence of vessels, situation of dangerous rapprochement, parameters of the shortest rapprochement of vessels.
Аннотация: Произведена формализация ситуации опасного сближения судов. Приведены формулы для расчета параметров относительного движения судов в зависимости от параметров их истинного движения.
Получены аналитические выражения для расчета значений времени и дистанции кратчайшего сближения пары судов. Формализовано условие сближения судов в зависимости от параметров ситуации их сближения.
Ключевые слова: безопасность судовождения, расхождение судов, ситуация опасного сближения, параметры кратчайшего сближения судов.
Постановка проблемы.
Снижение аварийности судов при плавании в стесненных водах является одной из важнейших проблем повышения безопасности судовождения.
В условиях быстротекущего изменения навигационной обстановки при плавании судна в стесненных водах судоводитель должен располагать оперативными методами оценки опасности сближения судов для своевременного предупреждения возможного столкновения. Поэтому разработка процедуры оценки опасности сближения судов, чему посвященная данная статья, является актуальным и перспективным научным направлением.
Анализ последних достижений и публикаций.
Вопросы предупреждения столкновений судов рассмотрены в многих работах современных ученых. В работе [1] приведено подробное исследование методов локально-независимого управления и разработан метод формирования гибких стратегий расхождения, а принцип внешнего управления процессом расхождения опасно сближающихся судов рассмотрены в работе [2], в которой также приведен анализ методов их реализации.
В монографии [3] приведен метод предупреждения столкновения судов путем смещения на параллельную линию пути. Экстренная стратегия расхождения при чрезмерном сближении судов предложена в работе [4], а в работе [5] рассмотрено взаимодействие судов в ситуации опасного сближения и выбор стратегии расхождения для предупреждения их столкновения. Стратегия управления тремя судами для безопасного расхождения предложена в работе [6]. а в публикации [7] для уклонения от столкновения предложен новый фуззи-метод. В работе [8] показано, что используя аналитическую модель морской системы GIS может быть получено точное прогнозирование времени столкновения и позиции. Предложенный метод дает оператору СУДС возможность принятия решений по предупреждению столкновения судов.
В работе [9] рассматривается и обсуждается метод оценки риска столкновения с использованием режима истинного движения. В ней вводятся линия прогнозируемого столкновения (LOPC) и зона препятствий по цели (OZT) для оценки риска столкновения, эти значения связаны с истинным движением, и это дает возможность выявить ситуации опасного сближения и обеспечить безопасное плавание в стесненных водах. В работе [10] излагается теоретическое обоснование автономной судовой системы уклонения от столкновения СА. Отмечается, что исследования по автоматизации управления судном могут быть представлены классическим подходом, основанным на математических моделях и алгоритмах, или компьютерной технологией, использующей искусственный интеллект.
Особенности внешнего управления процессом расхождения опасно сближающихся судов рассмотрены в работе [2], для реализации которого используются области опасных курсов и опасных скоростей пары судов.
Выделение нерешенных ранее частей общей проблемы.
Для получения аналитических выражений алгоритмов выбора безопасной стратегии расхождения опасно сближающихся судов необходимо произвести формализацию ситуации их сближения, позволяющую по ее параметрам оценить возможность возникновения столкновения судов.
Цель статьи.
Целью статьи является формализация ситуации сближения двух судов для оценки опасности их возможного столкновения.
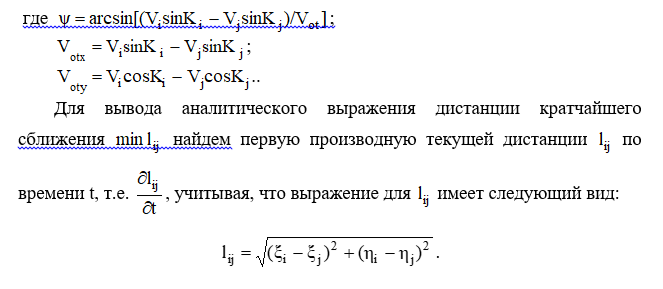
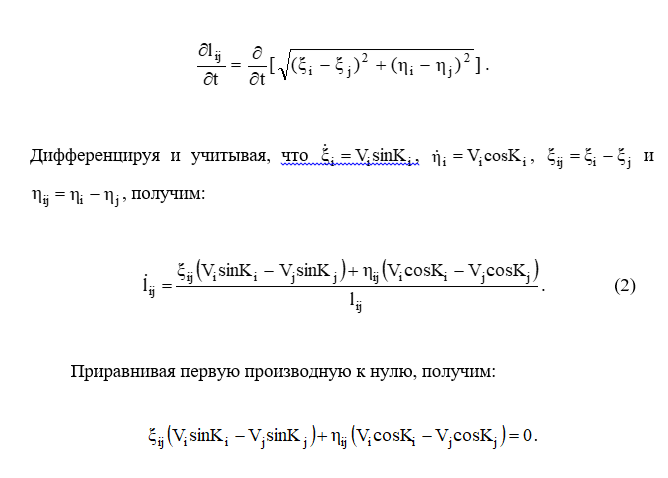
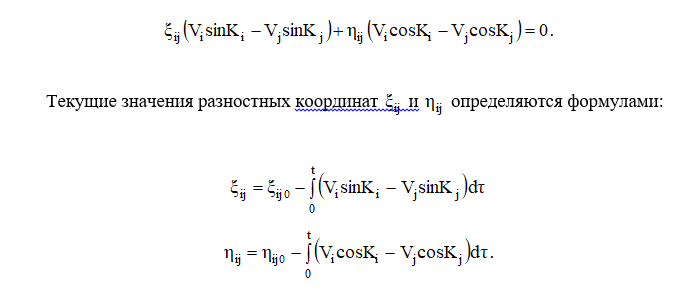
Изложение основного материала.
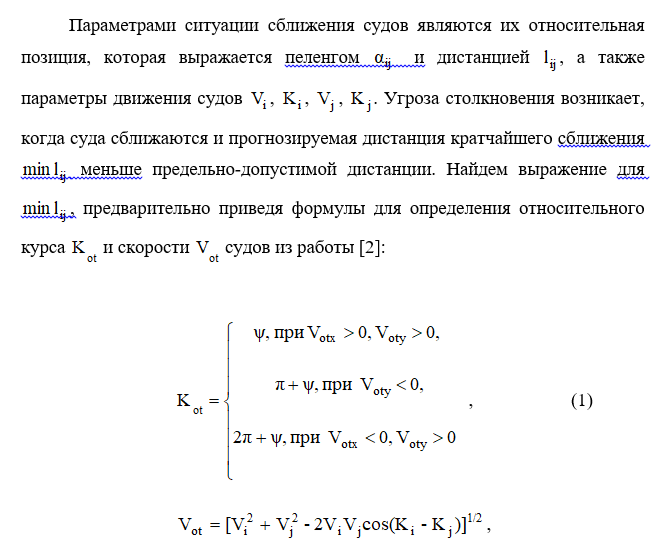

Следовательно, можно записать:
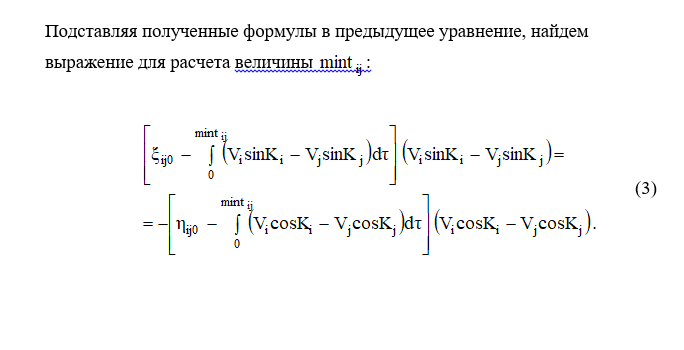
В случае прогнозирования, учитывая, что суда реализуют в программных траекториях движения участки локсодромии с постоянной скоростью, можно предположить, что на участке локсодромии значения параметров движения судов неизменны. Если есть основания предположить, что за интервал прогноза реализуется несколько участков программной траектории, то для прогноза корректным будет допущение о безынерционном движении судов с неизменными параметрами движения.
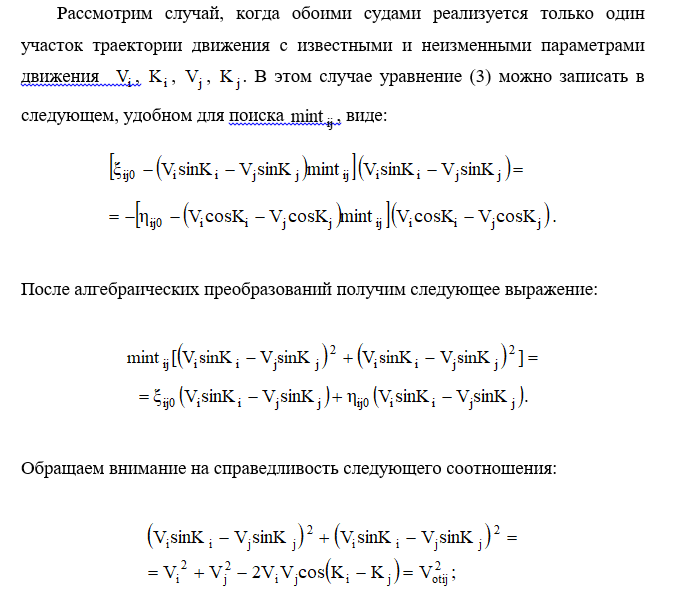
После алгебраических преобразований получим следующее выражение:
.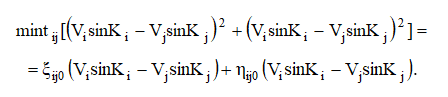
Обращаем внимание на справедливость следующего соотношения:
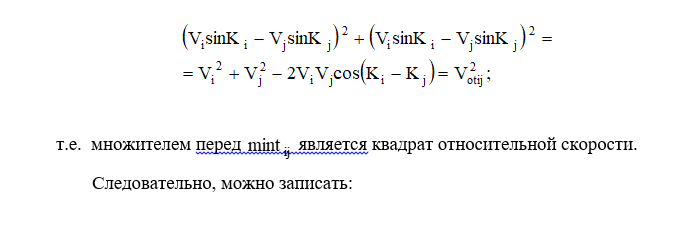
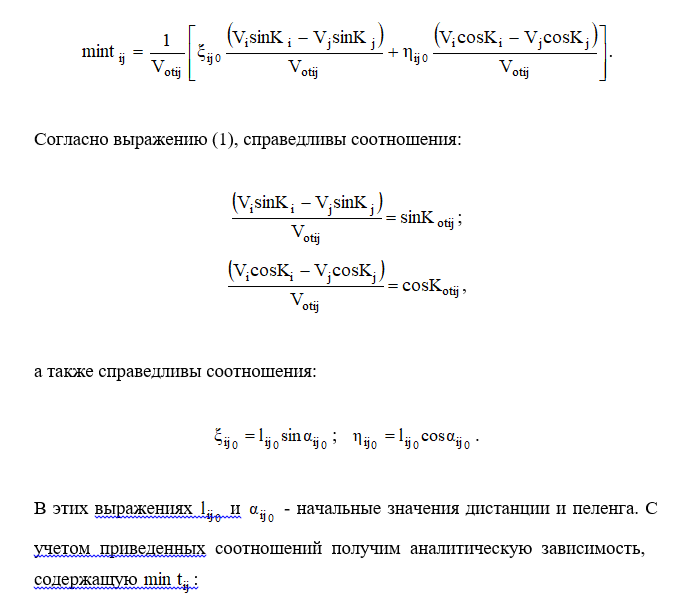 .
.
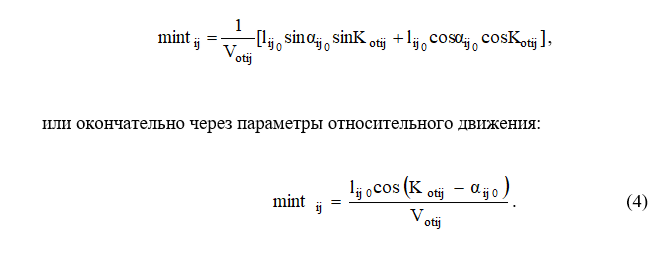
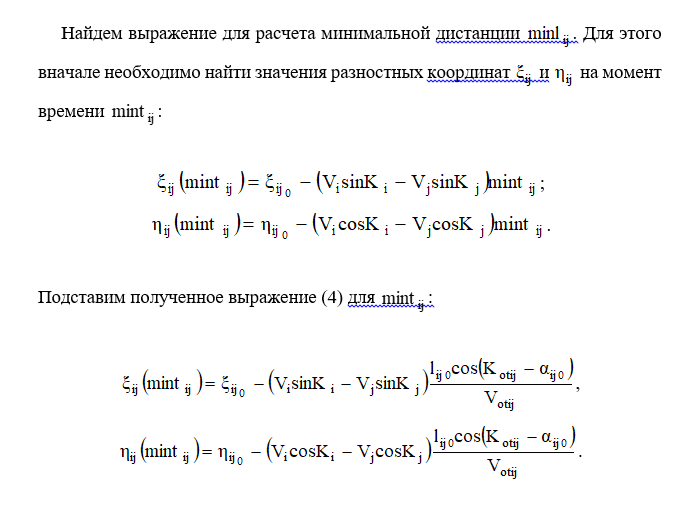
Учитывая ранее полученное выражение, записываем:
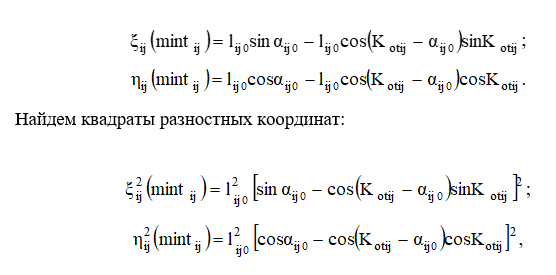
Найдем квадраты разностных координат:
откуда следует:
Производим дальнейшие преобразования:
 .
.
Рис. 1. Определение величины
Раньше получили выражения:
Выводы и предложения.
1. Приведены формулы для расчета параметров относительного движения судов в зависимости от параметров их истинного движения.
2. Получены аналитические выражения для оценки значений времени и дистанции кратчайшего сближения пары судов.
3. Формализовано условие сближения судов в зависимости от параметров ситуации их сближения.
Список литературы:
1. Цымбал Н.Н. Гибкие стратегии расхождения судов / Н.Н. Цымбал, И.А. Бурмака, Е.Е. Тюпиков. — Одесса: КП ОГТ, 2007. – 424 с.
2. Бурмака И.А. Управление судами в ситуации опасного сближения / И.А Бурмака., Э.Н Пятаков., А.Ю. Булгаков — LAP LAMBERT Academic Publishing, — Саарбрюккен (Германия), – 2016. — 585 с.
3. Вагущенко Л.Л. Расхождение с судами смещением на параллельную линию пути / Л.Л. Вагущенко. – Одесса: Фенікс, 2013. – 180 с.
4. Бурмака И.А. Экстренная стратегия расхождения при чрезмерном сближении судов / Бурмака И.А., Бурмака А. И., Бужбецкий Р.Ю. – LAP LAMBERT Academic Publishing, 2014. – 202 с.
5. Пятаков Э.Н. Взаимодействие судов при расхождении для предупреждения столкновения / Пятаков Э.Н., Бужбецкий Р.Ю., Бурмака И.А., Булгаков А.Ю. – Херсон: Гринь Д.С., 2015. — 312 с.
6. Бурмака И.А. Маневр расхождения трех судов изменением курсов/ И.А. Бурмака, А.Ю. Булгаков // Автоматизация судовых технических средств: науч. -техн. сб. – 2014. – Вып. 20. Одесса: ОНМА. — С. 18 -23.
7. Kao Sheng-Long. A fuzzy logic method for collision avoidance in vessel traffic service / Kao Sheng-Long, Lee Kuo-Tien, Chang Ki-Yin, Ко Min-Der// J. Navig. 2007. 60, № 1, p. 17-31.
8. Hornauer S. Trajectory Planning with Negotiation for Maritime Collision Avoidance / Hornauer S., Hahn A., Blaich M., Reuter J. TransNav, the International Journal on Marine Navigation and Safety of Sea Transportation, Vol. 9, No. 3, 2015, page 335-341.
9. Imazu H. Evaluation Method of Collision Risk by Using True Motion / Imazu H.// TransNav, the International Journal on Marine Navigation and Safety of Sea Transportation. 2017, Vol. 11, No. 1, p. 65-70.
10. Statheros Thomas. Autonomous ship collision avoidance navigation concepts, technologies and techniques / Statheros Thomas, Howells Gareth, McDonald-Maier Klaus. // J. Navig. 2008. 61, № 1, p. 129-142.