

Технические науки
Bogdanova N.V.
Philosophiae doctor, Departament of Acoustics&Acoustoelectronics,
National Technical University of Ukraine
“Igor Sikorsky Kyiv Polytechnic Institute”
Sinchuk I.A.
Student, Departament of Acoustics&Acoustoelectronics,
National Technical University of Ukraine
“Igor Sikorsky Kyiv Polytechnic Institute”
Богданова Наталія Володимирівна
кандидат технічних наук,
доцент кафедри Акустики та акустоелектроніки,
Національний технічний університет
«Київский політехнічний інститут ім. Ігоря Сікорьского»
Сінчук Ігор Олександрович
студент кафедра Акустики та акустоелектроніки,
Національний технічний університет
«Київский політехнічний інститут ім. Ігоря Сікорського»
DEVELOPMENT OF THE ACOUSTIC DIAGNOSTIC DETECTION SYSTEM USED BY THE ULTRASONIC SENSOR HC-SR04 FOR ARDUINO
РОЗРОБКА МАКЕТУ АКУСТИЧНОЇ СИСТЕМИ ВИЯВЛЕННЯ ПЕРЕШКОД ЗА ДОПОМОГОЮ УЛЬТРАЗВУКОВОГО ДАТЧИКА HC-SR04 ДЛЯ ARDUINO
Summary: The design and design of an interference-sensing acoustic system based on the Arduino Pro Mini microcontroller and the Ultrasonic ranging module HC-SR04 ultrasonic range finder have been developed.
The developed layout can be recharged from solar energy with the help of a solar panel installed on it. The program itself involves executing the microcontroller commands. An ultrasonic range finder is used to detect obstacles. Also installed photoresistors used by the microcontroller to find the most illuminated area of the room, for example, in order to charge the batteries, the system needs the sun.
Key words: robotics; ultrasonic electronic system; location; Arduino.
Анотація: Здійснено розробку та проектування акустичної системи виявлення перешкод на базі мікроконтролера Arduino Pro Mini та ультразвукового далекоміра Ultrasonic ranging module HC-SR04.
Розроблений макет може заряджатися від сонячної енергії за допомогою встановленої на ньому сонячної панелі. Сама програма системи передбачає виконання команд мікроконтролера. Для виявлення перешкод використовується ультразвуковий далекомір. Також встановлені фоторезистори, використовувані мікроконтролером для пошуку найбільш освітленої області приміщення, наприклад, для того, щоб зарядити акумулятори, системі потрібно сонце.
Ключові слова: робототехніка, ультразвукова електронна система, локація, Arduino.
Актуальнісь теми дослідження. Для більшості автономних мобільних платформ однією з актуальних задач є проблема розпізнавання та подолання перешкод. Рішення цієї проблеми є ключем до створення алгоритмів навігації робота в просторі, тобто аналізу навколишнього ситуації і вибору маршруту самим роботом без участі людини.
Представлені в літературі рішення [1-4] для орієнтації в просторі найчастіше засновані на наступних принципах:
— використання систем глобального позиціонування (GPS, ГЛОНАСС) і прив’язка до карті місцевості;
— використання систем машинного зору в оптичному діапазоні електромагнітного випромінювання (інфрачервоні камери, стандартні камери у видимій області спектра);
— використання різного роду датчиків відстані.
Основна проблема, що виникає при використанні систем на основі перших двох принципів – високе обчислювальне навантаження, пов’язане із завданнями обробки зображення від однієї або декількох камер, а також проблема аналізу відповідності поточних координат перешкодам, позначеним на карті місцевості. Крім того, системи глобального позиціонування, як правило, мають значну похибку в локальних умовах, а в закритих приміщеннях і зовсім можуть не працювати, що призводить до необхідності останніх обладнувати спеціальними засобами локалізації (активні маяки, мітки).
Електронна система виявлення перешкод (ЕСВП) – це сукупність технічних засобів та організаційних заходів, що дозволяють контролювати доступ до об’єктів ЕСВП.
В даний час, ЕСВП є одним з найбільш застосовних методів рішення задач виявлення перешкод. Дивлячись на швидке зростання інтересу до ЕСВП і перспективу широкого їх застосування в найближчому майбутньому, не слід забувати, що ЕСВП тільки спрощує процес ідентифікації, економить час і підвищує ефективність роботи служб безпеки організації, але, при цьому, все одно вимагає контролю з боку людини. Від рівня ймовірних загроз і поставлених перед системою завдань, залежить необхідність підбору оптимального співвідношення між людьми і технічними ресурсами системи.
Установка системи виявлення перешкод, що дозволить не тільки підняти рівень загальної безпеки, але і скоротити витрати на її забезпечення, оскільки ЕСВП не вимагають великої кількості персоналу для обслуговування, економічні в споживанні електроенергії.
Мета работи та завдання дослідження. Розробити акустичну систему виявлення перешкод з урахуванням сучасного рівня розвитку електроніки. При розробці необхідно задовольнити наступні вимоги, тобто, електронна система виявлення перешкод, що розробляється повинна володіти такими технічними параметрами:
- період між імпульсами не менше 50 мс;
- частота 40 кГц;
- робочий кут огляду 300;
- ефективний кут огляду 150;
- напруга живлення 5В;
- вимірюваний діапазон – від 2 до 400 см;
- точність – 0,3 см.
Також слід прагнути створити компактний і зручний у використанні пристрій, який буде конкурентоспроможним в порівнянні з аналогами.
Структурна схема системи ультразвукового виявлення перешкод. Акустична система (АС) базується на активному методі локації, а саме – ехо-імпульсному. В даному методі нас цікавить час затримки сигналу. Параметри інформаційного сигналу: даний інформаційний сигнал відноситься до динамічних, які призначені для передачі інформації в просторі (акустичні хвилі). Первинним параметром сигналу буде час, за який повертається відбитий сигнал.
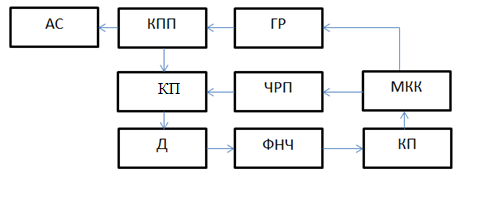
Рис. 1. Узагальнена структурна схема акустичної системи: АС – акустична система; КПП – комутатор прийому-передачі; ГР – генератор радіосигналу; КП – керуючий підсилювач (рп); ЧРП – часове регулювання підсилення; МКК – мікроконтроллер; Д – детектор; ФНЧ – фільтр низьких частот; КП – компаратор
Електричні імпульси надходять через КПП до оберненого акустичного перетворювача (АП) та випромінюються у повітря у вигляді зондуючого УЗ-імпульсу. Відбиті від перешкоди звукові хвилі потрапляють на вхід оберненого перетворювача, трансформуються в послідовність електричних імпульсів. Електричний еквівалент ехо – імпульсу поступає через КПП до тракту прийому сигналу, який реалізовано на основі оптимального приймача – корелятора, який складається з смугового фільтру – АП, детектору, ФНЧ та компаратору. Блок підсилення слугує для підтримання амплітуди зонда на постійному рівні. Блок ЧРП потрібен для того, щоб компенсувати втрати акустичної енергії за рахунок явища дифракції, розходження фронту хвилі.
Структурна схема електронної системи виявлення перешкод (рис.2.) складається з наступних елементів:
- фототранзистор;
- діод D;
- мікроконтролер Arduino Pro Mini (МК);
- сонячна панель;
- акумуляторна батарея живлення (АКБ);
- перетворювач напруги, що підвищує (П) DC/DC;
- модуль Bluetooth для управління по бездротовому зв’язку;
- модуль для управління по каналу інфрачервоного зв’язку (IR);
- ультразвуковий далекомір Ultrasonic ranging module HC-SR04.
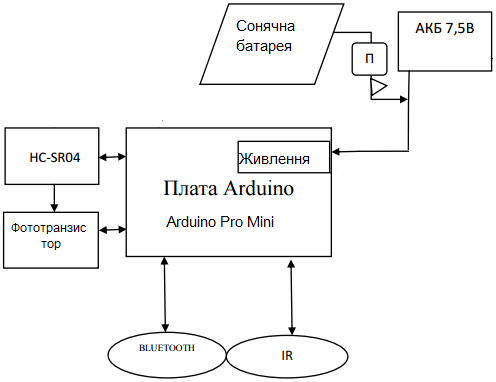
Рис. 2. Структурна схема електронної системи виявлення перешкод
Сонячні елементи можуть служити джерелом вторинного електроживлення, якщо таким чином заряджати акумулятори системи. Таке комбіноване джерело живлення знижує вимоги до потужності сонячних елементів в порівнянні з безпосереднім живленням системи від сонячних батарей.
Однак в цьому випадку система буде активно функціонувати тільки частину часу, а в іншу заряджати свої акумулятори [1].
Пристрій може взаємодіяти з оточенням за допомогою актюаторів – електронних компонентів, які перетворюють електричні сигнали в фізичні дії.
Сонячна енергія потрапляє на фотоелемент FS, який генерує електричний струм. Фотоелемент складається з декількох послідовно включених елементів, які генерують напругу порядку 5-7 В. Струм проходить від панелі до перетворювача напруги. Від перетворювача на виході маємо струм 8,40В. Через діод D струм йде до акумуляторних батарей. Діод в схемі потрібен для запобігання розряду акумуляторних батарей через сонячну панель.
При достатній кількості сонячних елементів можна створити сонячну батарею з практично будь-якими напругою і струмом і здатну забезпечити зарядку будь-якого типу акумуляторів. Звісно, не слід забувати, що потужна сонячна батарея буде займати велику площу для своєї установки.
Бажано використовувати сонячну батарею, що забезпечує прискорений зарядний струм, величина якого знаходиться в межах 0,15-0,3 від ємності акумуляторів [2].
Акумуляторні батареї, в свою чергу, живлять Arduino через канали живлення.
Користувач може управляти пристроєм за допомогою інфрачервоного каналу зв’язку за допомогою пульта управління або ж будь-яким Bluetooth- терміналом, що встановлюється на безліч сучасних пристроїв, таких як смартфони, планшети, комп’ютери.
Рух на світло здійснюється завдяки наявності фоторезисторів, встановлених в передній частині пристрою. Пристрій порівнює рівень освітленості і вибирає максимальне значення.
Автономний рух пристрою з обходом перешкод реалізовано за допомогою ультразвукового далекоміра моделі HC-SR04. Далекомір посилає сигнали і при зустрічі з перешкодою посилає сигнал на зупинку (звуковий).
Найбільша ефективність кутів огляду становить 15 °, що показано на рис.3. Діяльність виміру становить 4 метри.
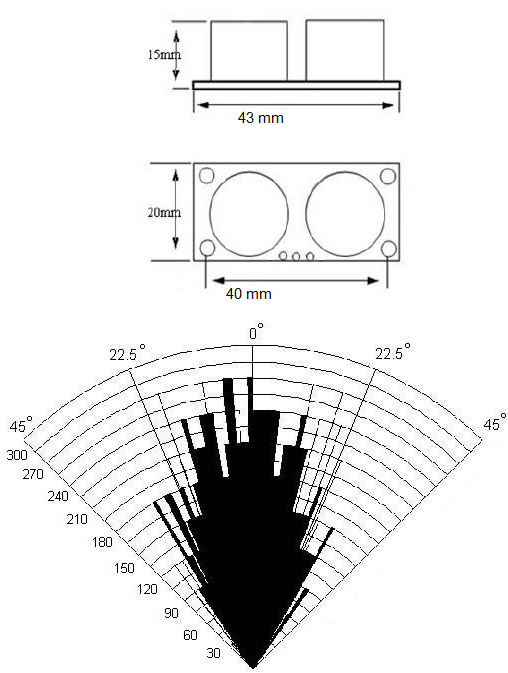
Рис. 3. Розміри та кут огляду ультразвукового далекоміра [5]
Відстань до об’єкта визначається за формулою:
де – відстань до об’єкта; – вимір прийнятої потужності випромінювання без підсвічування і з підсвічуванням відповідно; – функція обумовлена налаштуванням далекоміра.
У якості мікроконтролера використовуємо плату Arduino Pro Mini (рис. 4). Arduino Pro Mini побудована на мікроконтролері ATMega328. Дана плата використовується в рішеннях, які вимагають мінімальних розмірів (33,3мм*18,0мм) і низького споживання енергії.
Характеристики:
- мікроконтролер ATmega168
- робоча напруга 3,3В або 5В (в залежності від моделі)
- напруга живлення 3,35-12В (для моделі 3,3В) або 5-12В
(для моделі 5В) - цифрові входи / виходи 14 (з них 6 можуть використовуватися в якості ШІМ-виходів);
- аналогові входи 8;
- максимальний струм одного виведення 40 мА;
- Flash-пам’ять 16 КБ (з яких 2 КБ використовуються для завантаження);
- SRAM 1 КБ;
- EEPROM 512 байт;
- Тактова частота 8 МГц (для моделі 3,3В) або 16 МГц (в моделі 5В).
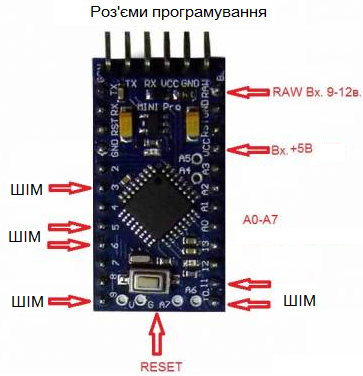
Рис. 4. Зовнішній вигляд та роз’єми плати Arduino Pro Mini [5]
Рис. 5. Електрична схема плати Arduino Pro Mini
Перетворювач напруги, що підвищує (П) DC/DC (рис. 6). DC-DC перетворювач напруги з 5-13 В на вході, до 12 В вихідного постійного струму 1,5А. Перетворювач отримує меншу напругу і дає більш високу на виході, щоб використовувати там де є напруга менша необхідних 12 вольт. Використовується для збільшення напруги наявних батарейок. Це по суті інтегральний DC-DC конвертер.

Рис. 6. Перетворювач напруги, що підвищує DC/DC [5]
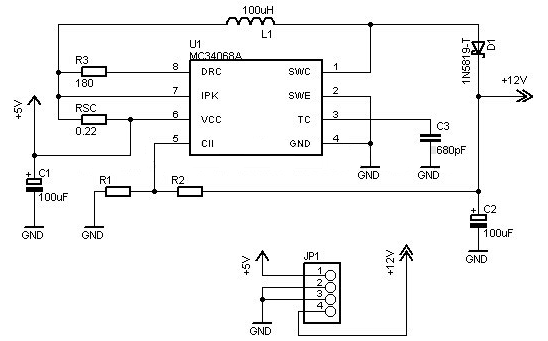
Рис. 7. Електрична схема перетворювача напруги DC/DC
Ультразвуковий далекомір Ultrasonic ranging module HC-SR04 (рис. 8).
Безконтактний спрямований датчик HC-SR04 використовуючи ультразвукові хвилі, вимірює відстань до об’єкта або просто виявляє перешкоду на шляху руху рухомої конструкції. На платі модуля розміщені п’єзовипромінювач ультразвуку і мікрофон, що сприймає відбиту хвилю. На відміну від інфрачервоних далекомірів на ультразвуковий датчик HC-SR04 не впливають джерела світла або колір перешкоди.
Можуть виникнути труднощі при визначенні відстані до пухнастих або тонких об’єктів. Швидкість звуку в повітрі залежить від температури, це впливає на точність датчика.
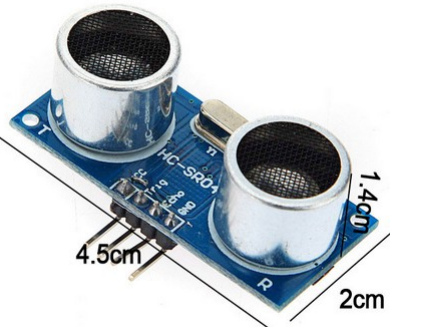
Рис. 8. Ультразвуковий далекомір Ultrasonic ranging module HC-SR04 [5]
Схема ультразвукового далекоміра Ultrasonic ranging module HC-SR04 наведена на рис. 9.
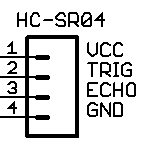
Рис. 9. Схема ультразвукового далекоміра Ultrasonic ranging module HC-SR04: VCC – живлення; GND — загальний провід; Trig — цифровий вхід для включення вимірювання; Echo — після завершення вимірювання, на цей вихід буде подана логічна одиниця на час, пропорційний відстані до об’єкта
Методика експериментальних досліджень, порівняння отриманих результатів з розрахунковими параметрами. Проводилося визначення відстані до різних об’єктів і результат спостереження виводився на індикаторі приймального вузла. (рис. 10), у нашому випадку через ноутбук. В якості перешкоди використовувалися об’єкти з різними коефіцієнтами відбиття ультразвуку, як, наприклад, скло, картон, тканина.

Рис. 10. Макетні випробування системи виявлення перешкод c перешкодою зі скла
Результати перевірки підтвердили працездатність пристрою в цілому. При цьому були отримані оцінки технічних характеристик пристрою для різних поверхонь, що відбивають, які наведені у таблиці 1.
Таблиця 1. Експериментальні технічні характеристики електронної системи виявлення перешкод
| Параметр | Скло | Картон | Вовняна тканина |
| Мінімальна вимірювана відстань, м | 0,1 | 0,1 | 0,1 |
| Максимальна стійко вимірювана відстань, м | 1,5 | 1 | 0,25 |
| Роздільна здатність, м | 0,02 | 0,02 | 0,02 |
Отримані результати відповідають вимогам, викладеним раніше, і узгоджуються з теоретичними для випадку поверхні, що добре відбиває. Разом з тим, з отриманих даних випливає максимальна відстань виявлення перешкоди сильно залежить від коефіцієнта відбиття, тобто від матеріалу з якого складається перешкода.
Висновки
Із результатів дослідження випливає ряд висновків, важливих для проектування систем, що включають в себе ультразвукові вимірювачі відстаней:
- використання ультразвукових вимірювачів відстані без використання додаткової підтримки виправдано тільки у випадку, якщо умови роботи системи чітко обумовлені (що відображає здатність об’єктів, межі вимірювання відстані до них);
- використання вимірників у динамічно мінливих умовах роботи без додаткової підтримки не гарантує отримання заявлених результатів. Подібна ситуація має місце, зокрема, при використанні робототехнічних комплексів і систем у польових умовах. Однак, залежність параметрів від умов роботи в рівній мірі властива іншим типам вимірювачів відстані (відео, лазерні). Звідси випливає, що використання ультразвукових датчиків в даному застосуванні доцільно використовувати спільно з іншими типами вимірювачів відстані. Це дозволяє компенсувати розбіжності у можливостях датчиків і забезпечити запас надійності системи в цілому;
- виходячи з вищесказаного, представляє інтерес визначення оптимальних комбінацій типів датчиків для використання в мобільних системах, а також оптимальних способів їх комбінування.
Разом з тим, отримані результати підтвердили працездатність запропонованих схемотехнічних і програмних рішень, що дозволило перейти до натурних випробувань розробленого модуля.
Література
- Di Halt Учебник по микроконтроллерам AVR для начинающих – Издательство: http://dihalt.ru/, 2008. – 574 с.
- Белов А. В. Микроконтроллеры AVR в радиолюбительской практике – СП: «Наука и Техника», 2007. – 339 с.
- Шпак Ю. А. Программирование микроконтроллеров на языке СИ. – К.: «МК-Пресс», СПб.: «КОРОНА-ВЕК», 2011. – 544 с.
- Белов А. В. Самоучитель разработчика устройств на микроконтроллерах AVR. – Изд. 2-е, перераб. и доп. – СПб.: Наука и Техника, 2010. – 528 с.
- Ультразвуковой дальномер HC-SR04. [Электронный ресурс]. — http://amperka.ru/product/hc-sr04-ultrasonic-sensor-distance-module.